Beginner Rust ESP32 development - Snake
2024-11-02In this post we will create a basic ESP32 project using Rust and espup.
We will write a Snake game to run on an ESP32 development board with a connected OLED display and controlled with a joystick.
The code for this example is available on Github in my snake_rust_esp32 repo.
Opinions expressed are solely my own and do not express the views or opinions of my employer.
Overview
I started this project to practice deploying Rust on an ESP32 board and basic peripheral interaction, as a complete beginner with embedded development and electronics.
The aim was to get more comfortable with the esp-hal crate and using embassy.
Video
Hardware
I used the following hardware:
- 1x ESP32-WROOM-32 Xtensa development board
- 1x SSD1306 128x64 I2C OLED display
- 1x KY-023 joystick module
- Jumper wires
- 2x Breadboards (joined together in this case, since the development board I used is wide).
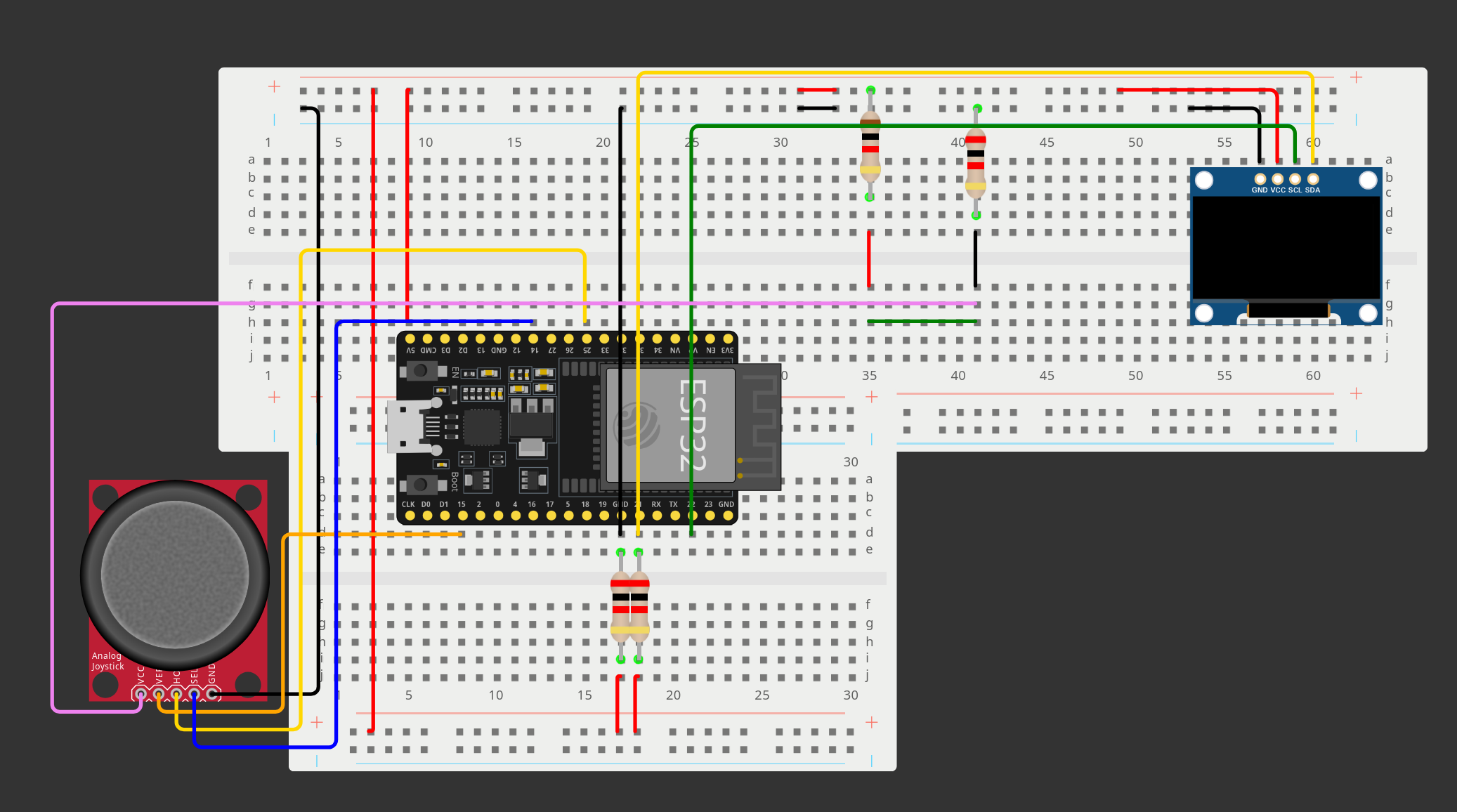
Wokwi wiring diagram - project link, note it does not build online
due to the dependencies:
Software
First install Rust and espup according to the Xtensa ESP32 section of the Rust on ESP32 book.
This project was written without using the standard library, so we use
the esp-template no_std template for project generation.
The code can the be built and flashed with:
$ source ~/export-esp.sh
$ cargo run --release
When connected with a data-transfer capable micro-USB cable.
Initialisation with Embassy
When using Embassy it is important to remember to initialise it with a timer so that spawned tasks will actually run.
#![no_std]
#![no_main]
...
#[esp_hal_embassy::main]
async fn main(spawner: Spawner) {
esp_println::logger::init_logger_from_env();
let peripherals = esp_hal::init(esp_hal::Config::default());
let io = esp_hal::gpio::Io::new(peripherals.GPIO, peripherals.IO_MUX);
let timg0 = TimerGroup::new(peripherals.TIMG0);
esp_hal_embassy::init(timg0.timer0);
...
}
Interacting with the OLED display over I2C
With the OLED display connected (note I used the 5V supply pin), we can interact with using the I2C communication protocol. We only need 2 GPIO pins for the clock and data. Any pins can be used for this, but be sure to avoid reserved pins if your board has those (e.g. pins reserved for SPI expansion, if these are restricted).
Here we use pins 21 and 22 for data and clock respectively.
let sda = io.pins.gpio21;
let scl = io.pins.gpio22;
let i2c = esp_hal::i2c::I2c::new(peripherals.I2C0, sda, scl, HertzU32::kHz(100));
One useful thing for debugging, is to scan for I2C devices connected to the pins. This is useful if you do not know which I2C address to use, but also to confirm that basic communication is working before writing more code.
This code is adapted from the ESP32 Embedded Rust at the HAL blog series:
for addr in 1..=127 {
esp_println::println!("Scanning Address {}", addr as u8);
let res = i2c.read(addr as u8, &mut [0]);
match res {
Ok(_) => esp_println::println!("Device Found at Address {}", addr as u8),
Err(_) => esp_println::println!("No Device Found"),
}
}
This helped me notice that the I2C pins required pull-up resistors, so I added two 2k Ohm resistors to the 5V rail.
In our case the address should be 0x3C (note for some different
SSD1306 displays it could be 0x3D so confirm this). This is the
default value in the Ssd1306 crate, so we do not need to provide this
address manually.
We can initialise the display with the following code:
let interface = I2CDisplayInterface::new(i2c);
let mut display = Ssd1306::new(interface, DisplaySize128x64, DisplayRotation::Rotate0)
.into_buffered_graphics_mode();
display.init().unwrap();
And then draw using the embedded_graphics crate:
let text_style = MonoTextStyleBuilder::new()
.font(&self.title_font)
.text_color(BinaryColor::On)
.build();
Text::with_baseline(
"Click stick\nto start! ",
Point::zero(),
text_style,
Baseline::Top,
)
.draw(display)
.unwrap();
display.flush().unwrap();
With this, we can draw and update the screen. Note that by default we
are using the BufferedGraphicsMode
which maintains a buffer and writes changes to the display when
flush() is called. This can be slow when there are a lot of changes.
Joystick axes inputs - Analogue to Digital Converters (ADC)
With the display communication working, we can move on to the joystick inputs. We will start with the axes inputs from moving the joystick, before handling the joystick clicking (switch) input. Note that only certain GPIO pins can be used with the ADCs- check this for your board.
One thing to note here is that the KY-023 module has very large dead zones, so it can really only be used like a Directional-pad with near-discrete directions, as subtle movements are lost.
For Snake we only need 4 directions - Up, Down, Left, and Right - and these correspond the extremes of the URX and URY outputs respectively (note these depends on the orientation you use the joystick in).
These outputs are analogue, so we must use the Analogue to Digital Converter (ADC) channels on the ESP32 board to read them. The ADCs have a limited voltage range, so in order to keep using the one 5V output we can use a voltage divider to reduce the input voltage to the KY-023 module such that the output voltages are within a usable range.
This was done using a 2k Ohm resistor connecting to ground, and a 1k Ohm resistor connecting to the 5V rail, with input taken in-between them.
With that done, we can carry out some tests to see the maximum and minimum values from the ADC when moving the joystick and use that to set the cut-off values for our directions:
const LOW_JOYSTICK: u16 = 100;
const MID_JOYSTICK: u16 = 1600;
const HIGH_JOYSTICK: u16 = 3500;
With these we can set the direction, but we now need a task to read the ADC and update this in the game code.
This is done with a separate embassy task which we can spawn to run concurrently. We use the atomic_enum crate to be able to share and update the Direction enum atomically.
The task - checking the ADC values every 100ms:
static PLAYER_DIRECTION: AtomicDirection = AtomicDirection::new(Direction::Right);
static PROCESSED_DIRECTION: AtomicDirection = AtomicDirection::new(Direction::Right);
#[embassy_executor::task]
async fn check_joypad(urx: GpioPin<25>, ury: GpioPin<15>, adc_peripheral: ADC2) {
let mut adc2_config = esp_hal::analog::adc::AdcConfig::new();
let mut urx_pin =
adc2_config.enable_pin(urx, esp_hal::analog::adc::Attenuation::Attenuation0dB);
let mut ury_pin =
adc2_config.enable_pin(ury, esp_hal::analog::adc::Attenuation::Attenuation0dB);
let mut adc2 = esp_hal::analog::adc::Adc::new(adc_peripheral, adc2_config);
loop {
let urx_pin_value: u16 =
esp_hal::prelude::nb::block!(adc2.read_oneshot(&mut urx_pin)).unwrap();
let ury_pin_value: u16 =
esp_hal::prelude::nb::block!(adc2.read_oneshot(&mut ury_pin)).unwrap();
if let Some(direction) = Direction::from_urx_ury(urx_pin_value, ury_pin_value) {
// We use processed direction to avoid being able to double back if we change
// direction twice before the next frame
let current_direction = PROCESSED_DIRECTION.load(Ordering::Relaxed);
if direction != current_direction && direction != current_direction.opposite() {
PLAYER_DIRECTION.store(direction, Ordering::Relaxed);
}
}
Timer::after(Duration::from_millis(100)).await;
}
}
Spawning the task and entering the game logic loop:
let urx = io.pins.gpio25;
let ury = io.pins.gpio15;
let adc2_peripheral = peripherals.ADC2;
spawner.spawn(check_joypad(urx, ury, adc2_peripheral)).ok();
loop {
game.process_frame(&mut display);
Timer::after(Duration::from_millis(300)).await;
}
Joystick click switch - interrupts
Now the only remaining part is to handle click inputs from the joystick. This is done with interrupts - we configure and enable the interrupt, and then bind a handler function to it which will be called when the interrupt is triggered.
This is convenient as we do not need to run our own task to check the input, it will be triggered immediately when the condition is met. Note we do not do this for the ADC inputs since there we require the ADC to run i.e. it is not a raw input.
Enabling and registering the interrupt:
let mut switch = gpio::Input::new(io.pins.gpio14, esp_hal::gpio::Pull::Up);
switch.listen(gpio::Event::FallingEdge);
esp_hal::interrupt::enable(Interrupt::GPIO, Priority::Priority3).unwrap();
unsafe {
// Do not enable all interrupts!
// esp_hal::xtensa_lx::interrupt::enable(); https://github.com/esp-rs/esp-hal/discussions/922
esp_hal::interrupt::bind_interrupt(Interrupt::GPIO, GPIO_HANDLER.handler());
}
critical_section::with(|cs| G_BUTTON.borrow_ref_mut(cs).replace(switch));
Note we use the critical_section crate as a sort of global mutex. This is necessary so we can access the switch GPIO input pin to clear the interrupt after it is handled.
Also take care to only enable the interrupt we are using, and not all interrupts (see the commented out line above), as that will lead to errors due to unhandled interrupts. This can be subtle too as crashes may only occur after running for a while e.g. see issue #922 on esp-hal.
The handler itself:
static CONFIRM_BOOL: AtomicBool = AtomicBool::new(false);
static G_BUTTON: Mutex<RefCell<Option<Input<AnyPin>>>> = Mutex::new(RefCell::new(None));
#[handler(priority = Priority::Priority3)]
fn GPIO_HANDLER() {
CONFIRM_BOOL.store(true, Ordering::Relaxed);
critical_section::with(|cs| {
G_BUTTON
.borrow_ref_mut(cs)
.as_mut()
.unwrap()
.clear_interrupt();
});
}
Here we just set CONFIRM_BOOL when interrupt is triggered, which is
then used in the game loop, e.g.:
match self.state {
...
GameState::GameOver => {
if CONFIRM_BOOL.swap(false, Ordering::Relaxed) {
self.state = GameState::Playing;
self.reset();
self.start_game(display);
}
}
}
Conclusion
That covers all of the embassy / esp32 related parts of this project (I won't cover programming Snake itself!). The source code is available in the snake_rust_esp32 repo on Github. The project is also available on Wokwi with the breadboard diagram but won't build there at the moment.
While the project is very simple, I think the benefits of using Rust are already apparent. For example, we were able to use the Ssd1306 crate to safely interact with the OLED display, while having the full expressive power of Rust's enums for handling game state, and Embassy for easily spawning asynchronous tasks.
The hardest parts were:
- Not realising the I2C pins needed pull-up resistors to communicate properly.
- Working out the right input input voltage for the KY-023 joystick so the output would be in a readable range for the ESP32 ADC.
This really just scratches the surface of what is possible with embassy and Rust on the ESP32 platform. I highly recommend Floodplain's Rust on ESP32 series on YouTube and the associated rust-on-esp32 and esp32-nostd Github repos for some great examples. The latter has a great example of an async task to automatically re-connect to the Wifi for example.
The following resources were very useful: